
網(wǎng)站首頁 | 加入收藏 | 網(wǎng)站地圖 |
基礎(chǔ)平臺截面轉(zhuǎn)動(dòng)法獲取對角線法原始數(shù)據(jù)的方法步驟
來源:泊頭浩業(yè)工量具 發(fā)布時(shí)間:2013/3/26 16:17:07
截面轉(zhuǎn)動(dòng)法與理想平面轉(zhuǎn)動(dòng)法圖解本質(zhì)一樣,所不同的是在圖解中代表理想平面的直線固定不動(dòng),將基礎(chǔ)平臺各截面(測量截面)假想轉(zhuǎn)動(dòng),使各個(gè)截面上的各測點(diǎn)相對于理想平面A0的偏差集中在一個(gè)平面直角坐標(biāo)上,此法要求知道截面上各點(diǎn)相對于首尾兩點(diǎn)連線的偏差值(即誤差折線)。因此該法適宜用水平儀、自準(zhǔn)直儀測量的數(shù)據(jù)。
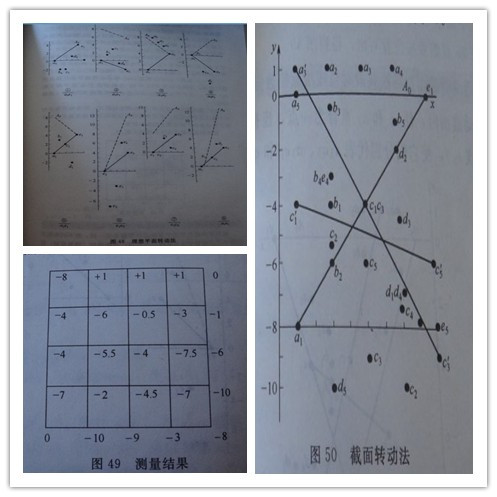 根據(jù)對角線原則,A0通過a5e1且與a1e5平行,以橫坐標(biāo)X表示各截面測量位置,縱坐標(biāo)Y表示基礎(chǔ)平臺平面度誤差。
根據(jù)對角線原則,A0通過a5e1且與a1e5平行,以橫坐標(biāo)X表示各截面測量位置,縱坐標(biāo)Y表示基礎(chǔ)平臺平面度誤差。

仍以圖48說明其方法步驟。
一、A0與a5e1截面 在X坐標(biāo)上取一段長度代表a5e1,將它分成四等分,表示該截面的5個(gè)測點(diǎn)。由于A0通過a5e1,因此a5e1線段代表理想平面A0,而a5e1截面上b4、c3、d2各點(diǎn)相對于A0位置等于b4、c3、d2各點(diǎn)相對于a5e1連接的直線度誤差,可按測量數(shù)據(jù)以a5e1為基線直接標(biāo)于圖50.
二、a1、e5 截面 由于他與A0平行,它與c3點(diǎn)偏差為-4-(+4)=-8,則a1e5低于A0為-8,畫出a1e5線平行于A0,以a1e5為基線等分四段,按測量數(shù)據(jù)將截面上b2、c3、d4值標(biāo)在圖50上。
三、a1a5、a1e1、a5e5、 e1e5四個(gè)截面 通過a1e1兩點(diǎn)作一直線(也可以通過a5e5作直線),則a1e1直線就代表了上述四個(gè)截面首尾兩點(diǎn)連線。此時(shí)相當(dāng)于將上述四截面經(jīng)過不同的轉(zhuǎn)動(dòng),使各截面首尾兩點(diǎn)連線重合在一起,則以a1e1為基線,將他分成四等分,按測量數(shù)據(jù)在圖上標(biāo)出a2、a3、a4、b1、c1、d1、b5、c5、d5、e2、e3、e412點(diǎn)在平面坐標(biāo)上的位置。
四、c1c5、a3e3截面 經(jīng)過上述圖解,已得到c1c5、a3e3 在圖中的位置,連接c1c5和a3e3分別得到上述兩截面首尾兩點(diǎn)連線。由于此兩線平行于y坐標(biāo),不便于圖解,可以將它假想的轉(zhuǎn)動(dòng)一下,如圖50中的c'1c'5、a'3e'3然后以此兩線為基線,將其分成四等分,按測量數(shù)據(jù)在圖中標(biāo)出c2、c4、b3、d4四點(diǎn)在平面坐標(biāo)上的位置。
至此平面上25個(gè)測點(diǎn)相對于A0的位置全部標(biāo)在一個(gè)坐標(biāo)上,所求25點(diǎn)偏差按位置寫出,得到圖49.

相關(guān)鏈接:
公司地址:北京市海淀區(qū)蘇家坨后沙澗 郵編:100000 電話:010-62480196 傳真:010-62481019 聯(lián)系人:李經(jīng)理
手機(jī):13581537355 QQ:287331305 網(wǎng)址:http://www.bjmybaby.com 郵箱:287331305@qq.com
手機(jī):13581537355 QQ:287331305 網(wǎng)址:http://www.bjmybaby.com 郵箱:287331305@qq.com
泊頭浩業(yè)工量具 2011(C)版權(quán)所有 并對網(wǎng)站所有內(nèi)容保留解釋權(quán) 冀ICP備13001909號-1 
冀公網(wǎng)安備13098102000324 號